수리과학, 물리학, 화학, 생명과학 분야와 이들을 기반으로 한 융&복합 분야
미래 산업 경쟁력 강화의 근간이 되는 소재 및 ICT 분야
과제 & 연구자
과제 & 연구자
큰 꿈을 향한 무한탐구의 연구열정,
삼성미래기술육성사업이 응원하며 함께 하겠습니다.

로봇 피부의 분산형 5감 인지용 말초신경계 광섬유센서망 개발
연구 목표
일상 생활의 사람과 직접 접촉하고 미세한 피부 감각을 실시간으로 주고 받으며 상호 작용하는 특징을 가지고 있는 컨슈머 로봇이 청소/빨래/설거지 등 가사 노동, 병원간호 및 건강관리, 시설안내, 물류/배송, 노인, 아동 및 반려동물 돌보미 등 다양한 개인용/전문적/서비스 로봇으로 적용 가능하기 위하여 인간 피부 같은 말초신경계 부여하기 위한 목표 수립.
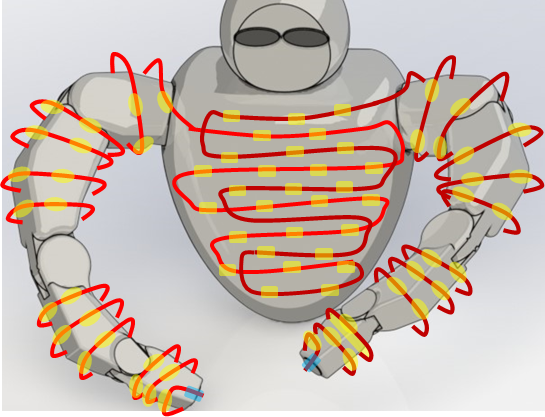
<1가닥의 광섬유 기반 말초 신경계 다중 광센서망 피부를 갖춘 컨슈머 로봇 개념도>
내용
일반적인 수동 전기식 센서망 기술은 측정 지점 당 2개씩 구리선의 병렬 연결을 필수적으로 요구함. 즉, N 개의 측정점의 경우 최소 2N가닥의 구리선이 중앙 프로세서와의 사이에 필요하므로, 무게와 부피, 다측정 신호간 간섭 잡음, 모듈 간 접속 어려움, 다중화 문제 등을 겪고 있음.
반면, 광섬유 센서망은 1가닥의 광섬유선을 따라 N개의 측정점이 다중화되어 직렬 연결 가능하고, 전자파장해나 무선주파수 간섭 무관, 작은 크기와 경량화, 고감도, 장기 안정성, 모듈 간 쉬운 접속 연결 등으로 컨슈머 로봇 응용을 위한 성능 우위가 기대됨.
이를 위하여 아래 3가지 연구 주제를 유기적 통합 수행
- 온도, 압력, 거리 및 진동을 실시간으로 느끼는 RF-sectioned 광섬유 센서망
- 펨토초 레이저 펄스열 기반으로 광섬유센서 어레이 제작 공정
- 센서망이 적용된 분산형 감각인지 피드백 기반 컨슈머 로봇의 동작
필요성
사람의 머리에는 5가지 주요 감각 중 4감 (시각, 청각, 후각, 미각)의 인지 정보 수집과 뇌에서의 정보 처리, 정보 저장의 기능이 집중되어 있고, 그 외 1감 (촉각)의 인지 정보 수집 및 말초 신경계의 정보 이동 등이 머리 이외 온 몸의 피부에 골고루 넓게 분산되어 있음. 그러나 로봇의 경우에는 사람과 다르게 눈, 귀, 코, 혀의 기능을 가지는 감각기관 부품 모듈이 머리에 해당하는 특정한 부분에 중앙 집중되어 있을 필요가 없음.
특히 사람과 밀착되어 상호 작용을 하는 컨슈머 로봇의 경우에는 피부 표면 부위의 분산형 접촉식 촉각 인지 기능이 더욱 중요함. 따라서, 로봇의 피부 부위를 통해 사람의 촉각과 같은 압력과 온도 센싱 뿐 아니라, 추가로 거리를 보는 눈과 소리를 듣는 귀가 피부표면에 골고루 퍼져있는 듯하게 거리 비디오 정보, 진동 오디오 정보도 실시간 비접촉으로 근거리 센싱이 가능한 획기적인 로봇 기술의 발전이 필요함.
기대효과
컨슈머 로봇이 드디어 사람과 안전하게 접촉하는 친근한 가족의 일원이 될 수 있으며,
돌발 충돌을 사전에 비접촉 방지하여 로봇 자신을 스스로 보호 및 로봇 간 근접 군집 협업 활용.
초저가격 광섬유 센서로 컨슈머 로봇의 사회적 대중화 및 대량 생산 보급에 따른 규모 경제 달성의 파급효과
연구 목표 일상 생활의 사람과 직접 접촉하고 미세한 피부 감각을 실시간으로 주고 받으며 상호 작용하는 특징을 가지고 있는 컨슈머 로봇이 청소/빨래/설거지 등 가사 노동, 병원간호 및 건강관리, 시설안내, 물류/배송, 노인, 아동 및 반려동물 돌보미 등 다양한 개인용/전문적/서비스 로봇으로 적용 가능하기 위하여 인간 피부 같은 말초신경계 부여하기 위한 목표 수립. <1가닥의 광섬유 기반 말초 신경계 다중 광센서망 피부를 갖춘 컨슈머 로봇 개념도> 내용 일반적인 수동 전기식 센서망 기술은 측정 지점 당 2개씩 구리선의 병렬 연결을 필수적으로 요구함. 즉, N 개의 측정점의 경우 최소 2N가닥의 구리선이 중앙 프로세서와의 사이에 필요하므로, 무게와 부피, 다측정 신호간 간섭 잡음, 모듈 간 접속 어려움, 다중화 문제 등을 겪고